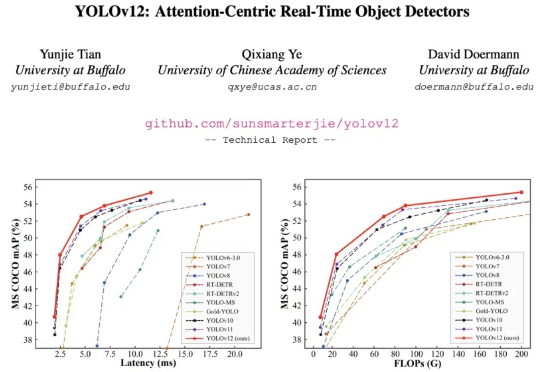
YOLO已经悄悄来到v12,首个以Attention为核心的YOLO框架问世
YOLO已经悄悄来到v12,首个以Attention为核心的YOLO框架问世YOLO 系列模型的结构创新一直围绕 CNN 展开,而让 transformer 具有统治优势的 attention 机制一直不是 YOLO 系列网络结构改进的重点。这主要的原因是 attention 机制的速度无法满足 YOLO 实时性的要求。
来自主题: AI技术研报
10185 点击 2025-02-22 14:14
 搜索
搜索
YOLO 系列模型的结构创新一直围绕 CNN 展开,而让 transformer 具有统治优势的 attention 机制一直不是 YOLO 系列网络结构改进的重点。这主要的原因是 attention 机制的速度无法满足 YOLO 实时性的要求。
正如论文一作所说,「新架构 Titans 既比 Transformer 和现代线性 RNN 更有效,也比 GPT-4 等超大型模型性能更强。」
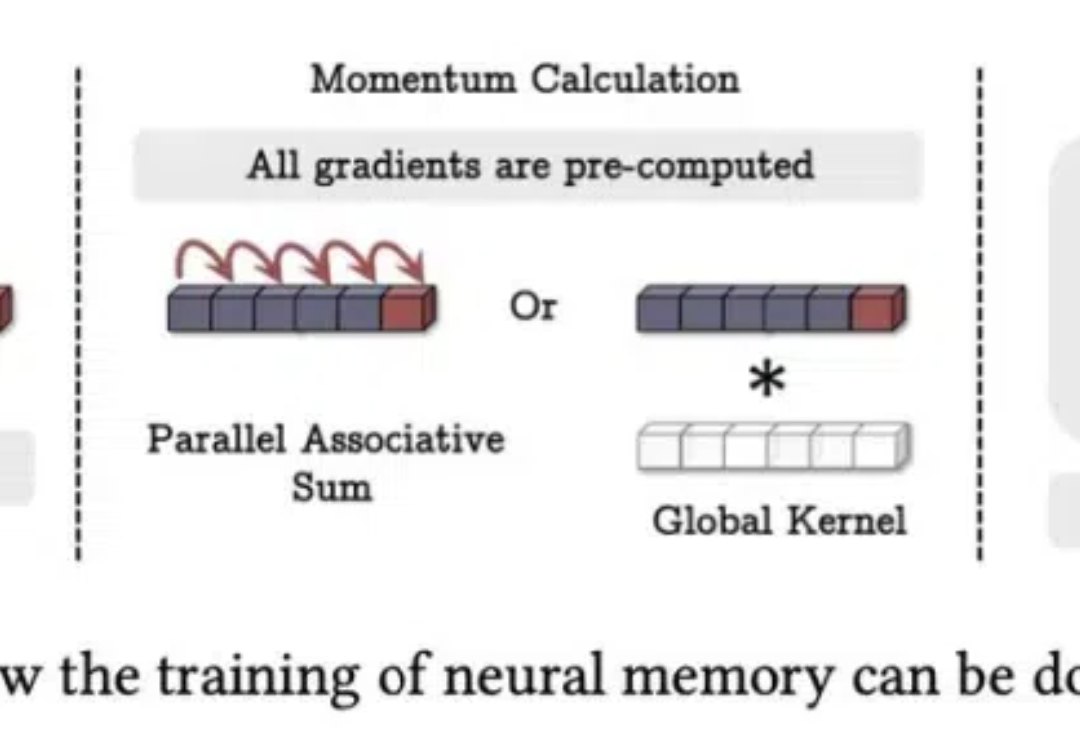
想挑战 Transformer 的新架构有很多,来自谷歌的“正统”继承者 Titan 架构更受关注。

Mamba 这种状态空间模型(SSM)被认为是 Transformer 架构的有力挑战者。近段时间,相关研究成果接连不断。而就在不久前,Mamba 作者 Albert Gu 与 Karan Goel、Chris Ré、Arjun Desai、Brandon Yang 一起共同创立的 Cartesia 获得 2700 万美元种子轮融资。
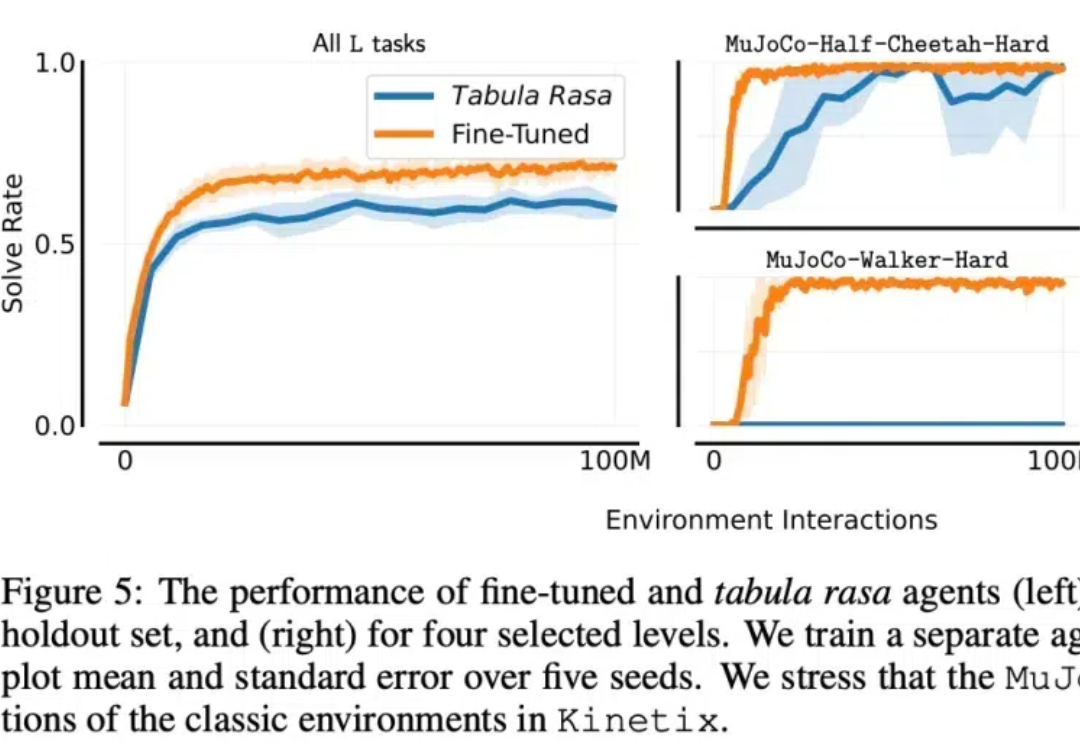
在机器学习领域,开发一个在未见过领域表现出色的通用智能体一直是长期目标之一。一种观点认为,在大量离线文本和视频数据上训练的大型 transformer 最终可以实现这一目标。
Sora 的发布让广大研究者及开发者深刻认识到基于 Transformer 架构扩散模型的巨大潜力。作为这一类的代表性工作,DiT 模型抛弃了传统的 U-Net 扩散架构,转而使用直筒型去噪模型。鉴于直筒型 DiT 在隐空间生成任务上效果出众,后续的一些工作如 PixArt、SD3 等等也都不约而同地使用了直筒型架构。
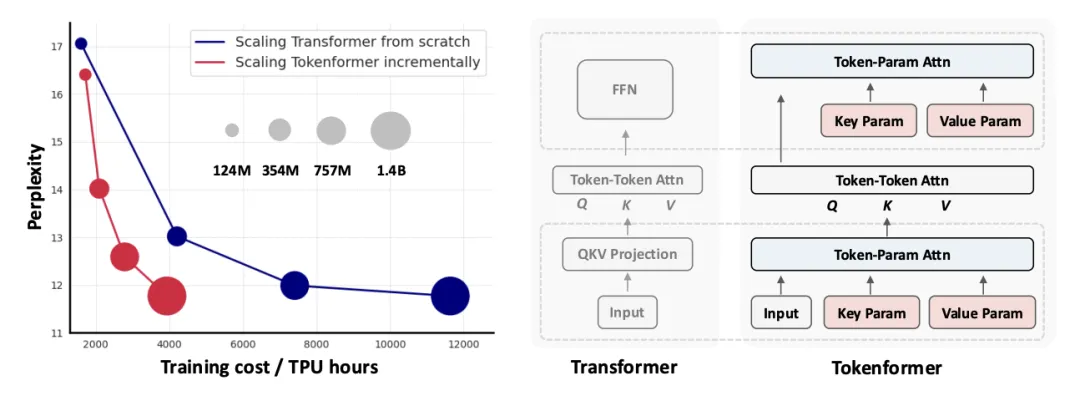
新一代通用灵活的网络结构 TokenFormer: Rethinking Transformer Scaling with Tokenized Model Parameters 来啦!

Transformer自问世后就大放异彩,但有个小毛病一直没解决: 总爱把注意力放在不相关的内容上,也就是信噪比低。 现在微软亚研院、清华团队出手,提出全新改进版Differential Transformer,专治这个老毛病,引起热议。
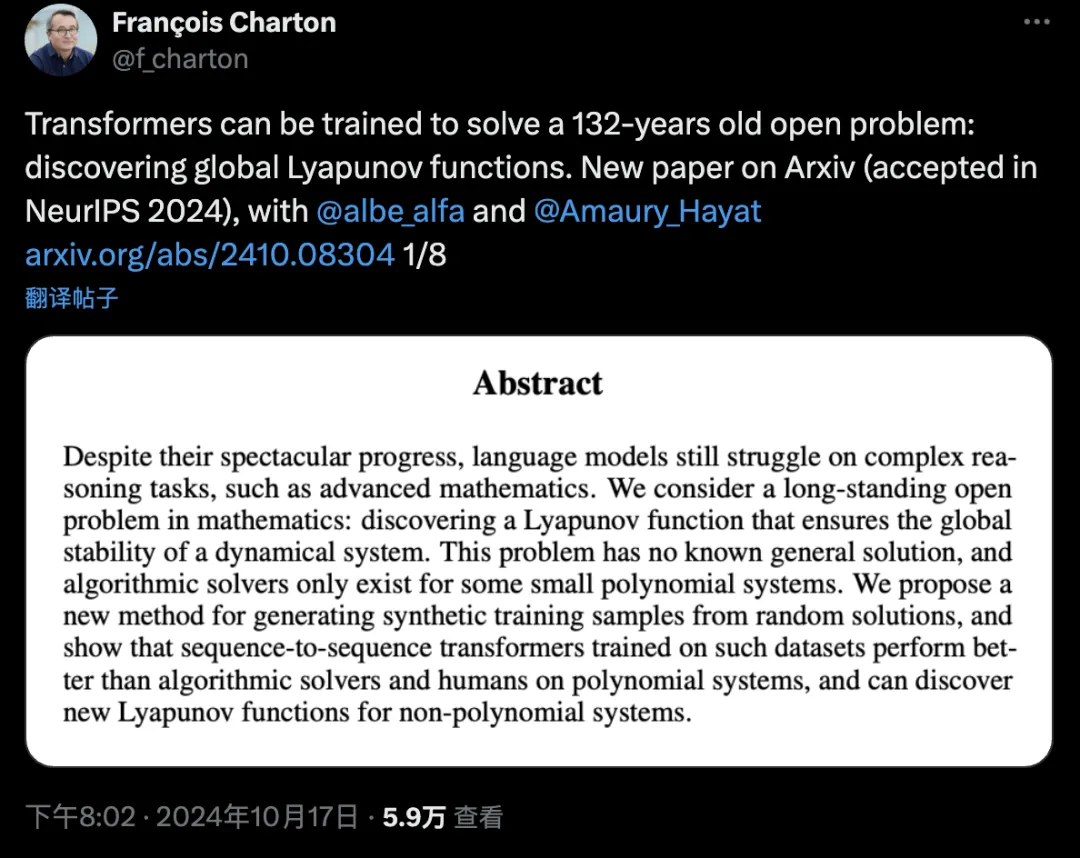
牛顿没解决的问题,AI给你解决了? AI的推理能力一直是研究的焦点。作为最纯粹、要求最高的推理形式之一,能否解决高级的数学问题,无疑是衡量语言模型推理水平的一把尺。
7 年前,谷歌在论文《Attention is All You Need》中提出了 Transformer。就在 Transformer 提出的第二年,谷歌又发布了 Universal Transformer(UT)。它的核心特征是通过跨层共享参数来实现深度循环,从而重新引入了 RNN 具有的循环表达能力。